SAVE TIME, GENERATE GREATER REVENUE WITH AERIAL TECHNOLOGY
The Autel EVO II Aircraft, coupled with the Emlid RS2 base station are a cost-effective combination for surveyors, construction survey, engineering, etc.
Real-Time Kinematic (RTK) corrections bring significant precision to unmanned aircraft and workflows, even to the point of achieving repeatable precision within 1cm of actual position in a localized dataset.
Adding RTK to an unmanned aircraft enables real-time correctional data to be sent to the aircraft, allowing the aircraft to write corrected information to the metadata captured in the aircraft’s camera/sensor system. This is achieved through the aircraft remote control/ground station controller receiving correctional information from either a network system (NTRIP) or a local base station sending correctional data to the controller. In either case, the corrected positional data is uploaded to the aircraft.
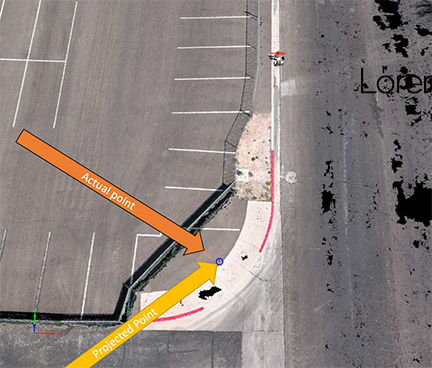
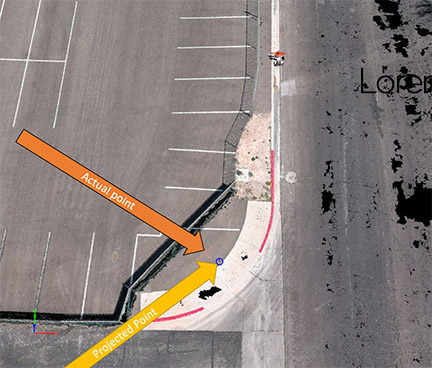
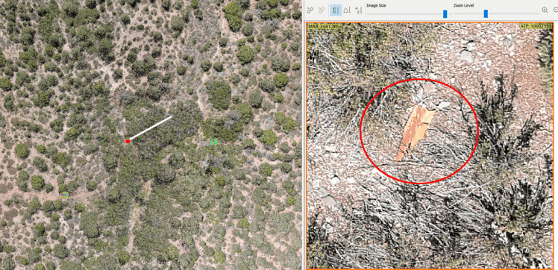
No corrections, no RTK, nearly 10′ from point
One of the greatest challenges/concerns with an RTK aircraft is to ensure the aircraft is receiving corrections throughout the entire flight. Over large areas where there may be pockets of RF interference from powerlines, trees, buildings, or other obstructions, it’s possible to have a few images without RTK corrections, particularly at the edges of the flight area. One remedy is to add a range extender such as the 4Hawks antenna system to the aircraft’s remote.
The 4Hawks Antenna system assists in ensuring RTK corrections are sent to the aircraft throughout the entire mission area.
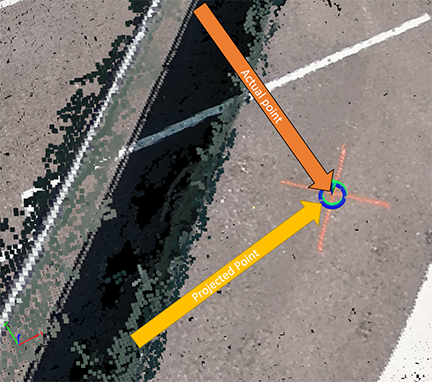
RTK systems gain slight benefit from the antenna-only system (autonomous positioning) while adding a base station or NTRIP network correctional system.
No corrections, RTK antenna-only. 13″ from actual
With RTK corrections sent to the aircraft, the point and the aircraft projections are 1 cm from the point.
We used a DT Research 301 data collector with a Seco RTK rod and head to verify data from the aircraft’s indicated position, and have since used a Leica GS18i to verify the points.
Jeremy Kippen from the KukerRanken Las Vegas store uses the DTResearch 301 system as a data collector to capture points on the ground, while flying the Autel EVO II RTK aircraft
Incorporating an RTK aircraft into the construction site, survey, engineering project, and many other uses provides a safer, faster, cost-effective means of capturing precise data, no matter the scenario. Topos, DSM, DTM, DEM, orthos, pointclouds, extraction for surfaces, and many other deliverables can become significantly more efficient when proper training and implementation techniques are observed. At KukerRanken, we’re here to help with UAS program development, training from Part 107 to operational techniques, and post-processing best practices.
Contact one of our KukerRanken staff to gain access to datasets demonstrating RTK with drone workflows. We offer Pix4DMapper, Pix4DSurvey, Leica Infinity, Leica 3DR, and many other training programs.
Diversified Communications is the very model of a modern conference company, but even its most experienced managers must have harbored slivers of doubt as they prepared the Commercial UAV Expo Americas, in the Mirage, Las Vegas, on 7-9 September. If we make it, will they come? Will they be so desirous of renewed face-to-face contact that the conference is a sell-out, or will they be unsure, unvaccinated or unmasked, therefore unwilling to risk it?
It turned out to be the former. The event was a huge success and participants reveled in being back together. The raw numbers, provided by DivCom’s genial and extremely knowledgeable event strategist, Carl Berndtson, were: 2767 registrants from 61 nations and all 50 states, 130 exhibitors (the hall included a Korean pavilion for the first time), 12 product launches, 150 speakers and double the projected attendance in the conference sessions. Registration reached 88% of the 2019 figure, way higher than many other conferences that have happened in recent months.
The outdoor demos were a sell-out, with 300 attendees. We were bused to the site near Henderson, Nevada. The shadeless bleachers became brutal as the morning wore on and the temperature rose towards 35°C, but compere Douglas Spotted Eagle of Sundance Media Group and KukerRanken, a regular at these events, repeatedly enjoined attendees to partake of the water provided, so casualties were minimal. We saw UAVs flown in 20-minute slots by Skyfront, CommAris (a brand of Terrafugia, the flying car people), Doosan Mobility Innovation, Skydio, AEE Technology, Autel Robotics, and BRINC/Adorama Business Solutions. This immediately underlined a theme of the conference, the real and increasing role of UAVs in emergency management, first response, and search and rescue. Another very apparent feature was the number of large aircraft, always, however, below the 55 lb limit. Skyfront’s multi-rotor, long-endurance UAV, with a gas engine generating electricity to drive the propellers, can carry a YellowScan lidar, though the large number of available payloads have somewhat of a defense focus. Douglas Spotted Eagle conducted an unscripted show of hands of the audience to see who was using lidar: there were nine responses from the bleachers, five using DJI, one Microdrones and three YellowScan.
Next on was CommAris, the big Seeker long-endurance VTOL requiring two crew with full jumpsuits and helmets to get it airborne. Despite its size (15’ wingspan), the Seeker can be quickly assembled in the field and can carry a 10-lb payload. I spoke to the CommAris folk in the exhibition: so far they don’t have a lidar customer, but they expect several and will keep us informed. As it flew, we saw a hawk (the bird, not the name of another UAV) fly near to take a look, but it elected not to attack. Doosan’s UAV was carrying a USPS package. It uses a hydrogen cell to increase endurance and brought home to us, if we weren’t already believers, that the carrying of packages by UAVs is happening in many countries and is a reality, no longer confined to carrying anti-venom in the remote Amazon, but likely soon to be part of daily life for the non-fluvial Amazon, Walmart and others. Indeed, Walmart’s “director last mile” gave a keynote on Thursday.
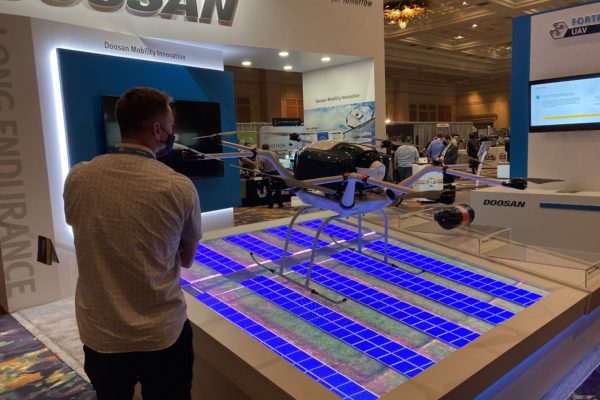
Doosan Mobility Innovation, indoors at Commercial UAV Expo 2021.
Act five was the public debut of the Mach 6 UAV from AEE, focused on public safety, with dual batteries to increase endurance. Though the payloads shown were not geospatial (thermal imagery of the audience; megaphone; delivery of automated external defibrillator through a partnership with Schiller Medical), the Mach 6 could easily carry lidar. It uses radar for collision avoidance and AEE has BVLOS very much in mind. AEE was followed by another new product, the Skydio X2. The firm has a defense focus and has won an AUVSI Excellence in Innovation award. The demo involved imagery and the creation of a mesh with photogrammetry – no mention of lidar. Like all the presenters, the Skydio team explained aspects of their software using both PowerPoint and live demos on the big screen, though bright sunlight and intense heat sapped audience concentration.
The Autel Dragonfish VTOL is not new, but has evolved considerably from earlier models. The aircraft has a two-hour endurance and offers a terrain-following feature. After the mission, it landed perfectly on the mat provided for it. The audience consisted on UAV veterans, yet this pinpoint ability – which all demos featured – never failed to raise some applause. The last performer was BRINC Drones, a Las Vegas company, assisted by Adorama. Its Lemur S, aimed at the public safety market, uses lidar to help navigation, but not for geospatial purposes. Nevertheless, this remarkable aircraft is worth a few words: if it crashes and tips over, it can get up, right itself and resume the mission; and it was demonstrated with an attachment that can break glass! The latter was used to enter a small hut on the demo site, and we were also shown the UAV flying thermal imagery inside a school bus. Truly remarkable!
Commercial UAV Expo 2021 attendees
Thus ended a wonderful morning, impressing upon us the progress being made by UAVs to the extent that they are part of daily life. The efforts of the firms’ personnel, some of whom had been out to the site on one or two previous occasions to rehearse, deserved applause – they had suffered the torrid conditions in order to make our time as productive as possible.
Returning from the desert, we had to prepare quickly for the afternoon fare, the product preview presentations. As always, these were a bit of an endurance test, with 17 15-minute presentations in each of two rooms, necessitating agile jumping between the two in pursuit of the best mix. There were frustrations – ASPRS did not speak at the time advertised on the program, and RIEGL and LiDAR USA were on at the same time – yet the speakers managed to overcome the temptations to firehose us with small detail of their products and the afternoon passed quickly and informatively. There was too much here to report in a few words, but it’s worth following up the geospatial lidar players by looking at their websites for the latest developments, such as DJI, GeoCue, Leica Geosystems, LiDAR USA, RIEGL, SimActive and YellowScan, and imaging players such as AgEagle and Phase One.
After the demanding first day, the event resumed on the Wednesday with opening remarks from DivCom director Lee Corkhill. Top of the bill keynote was Stephen Dickson, FAA Administrator (ex USAF and Delta). He gave a fine presentation, but, as usually happens in these events, once its representative had departed, FAA was targeted with some less than complimentary remarks by later speakers, all of whom are anxious to fly BVLOS, or in the dark, or over populated areas, or all of the above, sooner rather than later. As Stephen said, lots of progress has been made on night flying, but for other desires waivers are the current way to go, so we’re at an inflection point as this process cannot be sustained at scale. Whatever other speakers may have felt, there is no doubt that FAA is busy and one cannot argue with Stephen’s closing remarks, “Safety is a journey, not a destination”, and his emphases on humility and safety.
There was too much in the show to spend time on every booth. Among highlights were, prominent on the DJI booth, an M600 with the Zenmuse L1 lidar sensor. Phase One had a new camera, the P3, complete with gimbal. Emesent had the Hovermap lidar sensor, complete with SLAM software, i.e. it also works in GNSS-denied environments, which can be mounted on UAVs, or land vehicles, or in a backpack of hand-carried – indeed, Emesent perhaps stole the show by showing it on the back of Spot, the robotic dog from Boston Dynamics (remember reading about it inLIDAR Magazine?[1]). Leica Geosystems introduced BLK2FLY, its gorgeous new laser scanner snuggling inside a quadcopter, also called an “autonomous flying laser scanner”. The software is richly furnished with SLAM as well as GNSS/IMU components. Some of the exhibitors gave additional presentations in the theater set up in the exhibition hall, so there was no excuse not to find out about products of interest.
LIDAR Magazine was invited to participate in the “Meet the Press” event. Of the 25 firms who entered, 16 sent representatives to the one-hour live event, at which they spoke for two minutes each, followed by one minute for questions. The speakers entered into the spirit of this “fun” session and fielded the questions both competently and with a sense of humor. The journalists went into purdah and chose Emesent, BRINC Drones and vHive as winners[2].
Teledyne FLIR spokesperson shares a new sensor with the press.
Amongst all this, I attended as many sessions as possible. Jeremiah Karpowicz of DivCom conducted a good on-stage discussion with Brandon Torres Declet, the new CEO of AgEagle. DivCom favors a formula where part or all of almost every session is a panel discussion, with several experts on stage. Some of these were a tad thin or repetitive, but invariably attorneys, police officers and firefighters did well. These people may not be ideal to discern trends for us after a moment’s thought, but they are performing or managing UAV flights in the thousands every year, so listen up! We’ve moved from shiny toys to commercialization, rapidly and successfully. A session on construction revealed what could be done, for example measuring cranes, flare structures, Las Vegas’s Allegiant Stadium. UAV-delivery firms Zipline and DroneUp both made deep impressions.
Towards the end of the conference, our regular contributor Lewis Graham chaired a session on surveying and mapping. I felt on more familiar ground here as speakers from Ohio UAS Center and The Ohio State University talked about the multiplicity of projects they had completed, while sometimes humorously referring to some of the day-to-day problems they encountered. Also in this session was one of the firms from the Korean pavilion in the exhibition, describing UAV-based geomatics land data acquisition in Ethiopia, using a UAV built in Korea.
ASPRS ran four two-hour workshops, two on Wednesday and two on Thursday, one pair on UAV-photogrammetry and one on UAV-lidar. All were well attended, confirming the thirst for knowledge that was so obvious from the buzz and attendance at this event
The DivCom sales team was energetically working the halls and must have a good chance of following the sell-out exhibition with another one at the Geo Week conferences in Denver in February 2022, where ILMF, AEC Next, SPAR 3D, ASPRS and USIBD will be combined. Meanwhile, LIDAR Magazine was taking every opportunity to solicit firms for articles, as a result of which we are working with DJI, Emesent, LightWare, Phoenix LiDAR Systems, SimActive and several others.
DivCom has decided to change the venue of Commercial UAV Expo Americas and the next iteration of the event will be at Caesars Forum on 6-8 September 2022. LIDAR Magazine would have preferred a slot later in the year, so we would be less well done at the outdoor demos, but won’t hesitate to be there, to learn, enjoy, contribute and be thankful. While the scope of UAVs extends far beyond the geospatial, and the lidar vertical is but a small part of a market dominated by public safety and parcel deliveries, I wouldn’t willingly miss this event. The UAV world is fast moving and more than one company said it was in robotics rather than drones. DivCom’s formula of a technology-based rather than market-based event works and the wide range of backgrounds of attendees is a big plus. I felt almost overwhelmed by information, yet stimulated, inspired and anxious to reflect in order to get it all into perspective. Probably that’s what a successful conference event should inspire!
As I finished this report, HxGN LIVE GeoSummit and Intergeo, remote and hybrid respectively, were swinging into action. Once again, we’re in the thick of development and struggling to assimilate all the news and innovations. It’s a great time to be in lidar!
A Deep Insider’s Look at a Rugged Terrain Mission to Investigate a Helicopter Crash with Drones
Crash site investigation with drones has emerged as a leading application for unmanned systems in public safety. Gathering data that can be used by investigators in a courtroom, however, requires careful mission planning. Here, sUAS expert and industry figure Douglas Spotted Eagle of KukerRanken provides a detailed insider’s view of a helicopter crash site investigation.
Unmanned aircraft have become proven assets during investigations, offering not only the ability to reconstruct a scene. When a high ground sampling distance (GSD) is used, the data may be deeply examined, allowing investigators to find evidence that may have not been seen for various reasons during a site walk-through.
Recently, David Martel, Brady Reisch and I were called upon to assist in multiple investigations where debris was scattered over a large area, and investigators could not safely traverse the areas where high speed impacts may have spread evidence over large rocky, uneven areas. In this particular case, a EuroStar 350 aircraft may have experienced a cable wrap around the tail rotor and boom, potentially pulling the tail boom toward the nose of the aircraft, causing a high speed rotation of the hull prior to impact. Debris was spread over a relatively contained area, with some evidence unfound.
“The helicopter was on its right side in mountainous densely forested desert terrain at an elevation of 6,741 ft mean sea level (MSL). The steel long line cable impacted the main rotor blades and was also entangled in the separated tail rotor. The tail rotor with one blade attached was 21 ft. from the main wreckage. Approximately 30 ft. of long line and one tail rotor blade were not located. The vertical stabilizer was 365 ft. from the main wreckage.”
With a missing tail rotor blade and the missing long line, unmanned aircraft were called in to provide a high resolution map of the rugged area/terrain, in hopes of locating the missing parts that may or may not aid in the crash investigation.
The terrain was difficult and unimproved, requiring four-wheel drive vehicles for access into the crash site. Due to rising terrain, we elected to launch/land the aircraft from the highest point relevant to the crash search area, which encompassed a total of approximately 70 acres.
Adding to the difficulty of finding missing parts was that the helicopter was partially covered in grey vinyl wrap, along with red and black vinyl wrap, having recently been wrapped for a trade show where the helicopter was displayed.
We arrived on scene armed with pre-loaded Google Earth overheads, and an idea of optimal locations to place seven Hoodman GCP discs, which would allow us to capture RTK points for accuracy, and Manual Tie Points once the images were loaded into Pix4D. We pre-planned the flight for an extremely high ground sampling distance (GSD) average of .4cm per pixel. Due to the mountainous terrain, this GSD would vary from the top to the bottom of the site. We planned to capture the impact location at various GSD for best image evaluation, averaging as tight as .2cmppx. Some of these images would be discarded for the final output, and used only for purposes of investigation.
Although the overall GSD was greater than necessary, the goal is to be able to zoom in very deep on heavily covered areas with the ability to determine the difference between rocks and potential evidence, enabling investigators to view the overall scene via a 3.5 GB GeoTiff in Google Earth, and refer back to the Pix4DMapper project once rendered/assembled.
The same scene minus initial marker points.
Although working directly in Pix4D provides the best in-depth view of each individual photo, the Google Earth overlay/geotiff enables a reasonably deep examination.
Using two of the recently released Autel EVO II Pro aircraft, we planned the missions so that one aircraft would manage North/South corridors while the other captured East/West corridors. Planning the mission in this manner allows for half the work time, while capturing the entire scene. This is the same method we used to capture the MGM festival grounds following the One October shooting in Las Vegas, Nevada. The primary difference is in the overall size, with the Pioche mission being nearly 70 acres, while the Las Vegas festival ground shooting area is under 20 acres in total.
Similar to the Las Vegas shooting scene, shadow distortion/scene corruption was a concern; flying two aircraft beginning at 11:00 a.m. and flying until 1:30 aided in avoiding issues with shadow.
Temporal and spatial offsets were employed to ensure that the EVO II Pro aircraft could not possibly collide, we set off at opposite sides of the area, at different points in time, with a few feet of vertical offset added in for an additional cushion of air between the EVO II. We programmed the missions to fly at a lower speed of 11 mph/16fps to ensure that the high GSD/low altitude images would be crisp and clean. It is possible to fly faster and complete the mission sooner, yet with the 3 hour travel time from Las Vegas to the crash site, we wanted to ensure everything was captured at its best possible resolution with no blur, streak, or otherwise challenged imagery. Overall, each aircraft emptied five batteries, with our batteries set to exchange notification at 30%.
Total mission running time was slightly over 2.5 hours per aircraft, with additional manual flight over the scene of impact requiring another 45 minutes of flight time to capture deep detail. We also captured imagery facing the telecommunications tower at the top of the mountain for line of sight reference, and images facing the last known landing area, again for visual reference to potential lines of sight.
By launching/landing from the highest point in the area to be mapped, we were able to avoid any signal loss across the heavily wooded area. To ensure VLOS was maintained at all times, FoxFury D3060’s were mounted and in strobing mode for both sets of missions (The FoxFury lighting kit is included with the Autel EVO II Pro and EVO II Dual Rugged Bundle kits).
Once an initial flight to check exposure/camera settings was performed, along with standard controllability checks and other pre-flight tasks, we sent the aircraft on their way.
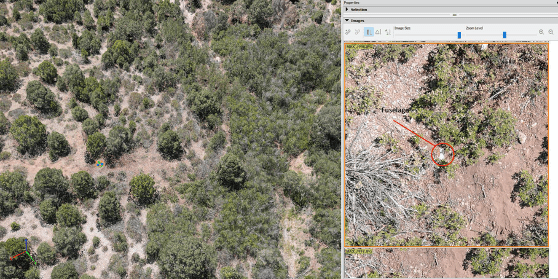
Capturing over 6000 images, we checked image quality periodically to ensure consistency. Once the missions were complete, we drove to the site of impact to capture obliques of the specific area in order to create a more dense model/map of the actual impact site. We also manually flew a ravine running parallel to the point of impact to determine if any additional debris was found (we did find several small pieces of fuselage, tools assumed to be cast off at impact, and other debris.
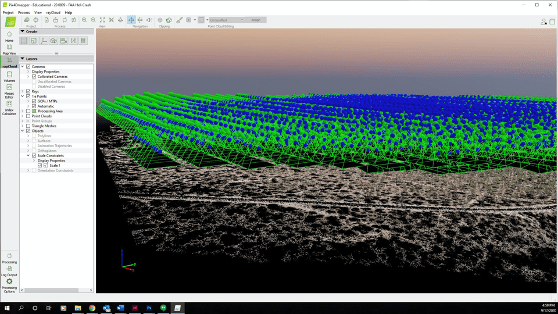
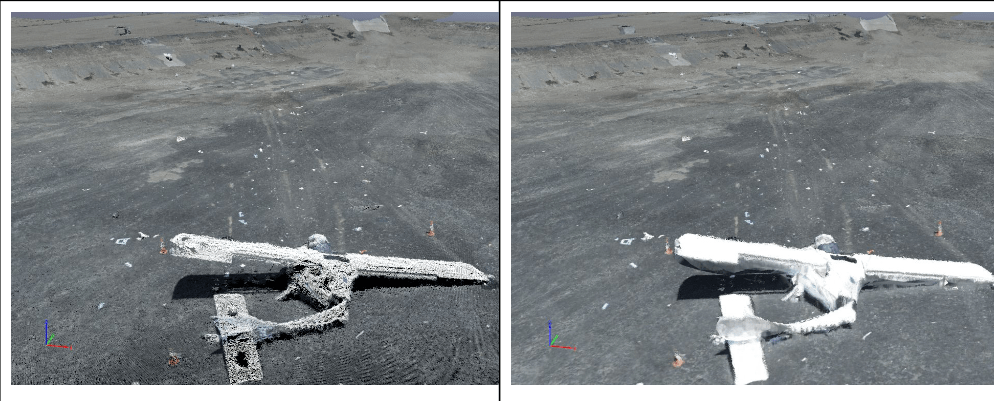
The initial pointcloud took approximately 12 hours to render, generating a high-quality, highly dense initial cloud.
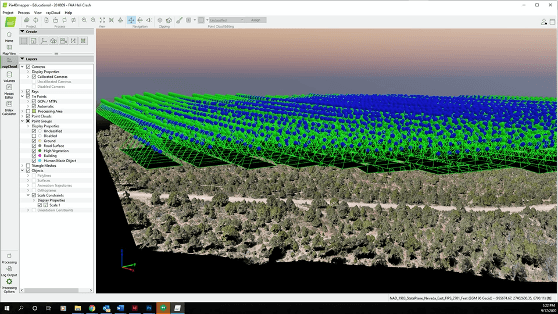
After laying in point controls, marking scale constraints as a check, and re-optimized the project in Pix4D, the second step was rendered to create the dense point cloud. We were stunned at the quality of the dense point cloud, given the large area.
The dense point cloud is ideal for purposes of measuring. Although this sort of site would typically benefit (visually) from texturing/placing the mesh, it was not necessary due to the high number of points and deep detail the combination of Pix4D and Autel EVO II Pro provided. This allowed us to select specific points where we believed points of evidence may be located, bringing up the high resolution images relevant to that area. Investigators were able to deep-dive into the area and locate small parts, none of which were relevant to better understanding the cause of the crash.
“The project generated 38,426,205 2D points and 13,712,897 3D points from a combination of nearly 7,000 images.”
Using this method of reviewing the site allows investigators to see more deeply, with ability to repeatedly examine areas, identify patterns from an overhead view, and safely search for additional evidence that may not be accessible by vehicle or foot. Literally every inch of the site may be gone over.
Further, using a variety of computer-aided search tools, investigators may plug in an application to search for specific color parameters. For example, much of the fuselage is red in color, allowing investigators to search for a specific range of red colors. Pieces of fuselage as small as 1” were discovered using this method. Bright white allowed for finding some items, while 0-16 level black allowed for finding other small objects such as stickers, toolbox, and oil cans.
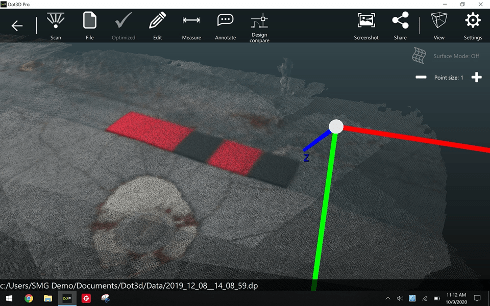
Using a tool such as the DTResearch 301 to capture the RTK geolocation information, we also use the DTResearch ruggedized tablet as a localized pointcloud scan which may be tied into the Pix4Dmapper application. Capturing local scan data from a terrestrial perspective with GCP’s in the image allow for extremely deep detail in small environments. This is particularly valuable for construction sites or interior scans, along with uses for OIS, etc.
Primary Considerations When Capturing a Scene Twin
GSD. This is critical. There is a balance between altitude and propwash, with all necessary safety considerations. Vertical surfaces. In the event of an OIS where walls have been impacted, the ability to fly vertical surfaces and capture them with a consistent GSD will go a long way to creating a proper model. Shadow distortion. If the scene is very large, time will naturally fly by and so will the sun. In some conditions, it’s difficult to know the difference between burn marks and shadows. A bit of experience and experimentation will help manage this challenge.
Exposure. Checking exposure prior to the mission is very important, particularly if an application like Pix4Dreact isn’t available for rapid mapping to check the data on-site. Angle of sun/time of day. Of course, accidents, incidents, crime, and other scenes happen when they happen. However, if the scene allows for capture in the midday hours, grab the opportunity and be grateful. This is specifically the reason that our team developed night-time CSI/Datacapture, now copied by several training organizations across the country over recent years.
Overcapture. Too much overlap is significantly preferable to undercapture. Ortho and modeling software love images.
Obliques. Capture obliques whenever possible. Regardless of intended use, capture the angular views of a scene. When possible, combine with ground-level terrestrial imaging. Sometimes this may be best accomplished by walking the scene perimeter with the UA, capturing as the aircraft is walked. We recommend removing props in these situations to ensure everyone’s safety.
What happens when these points are put aside?
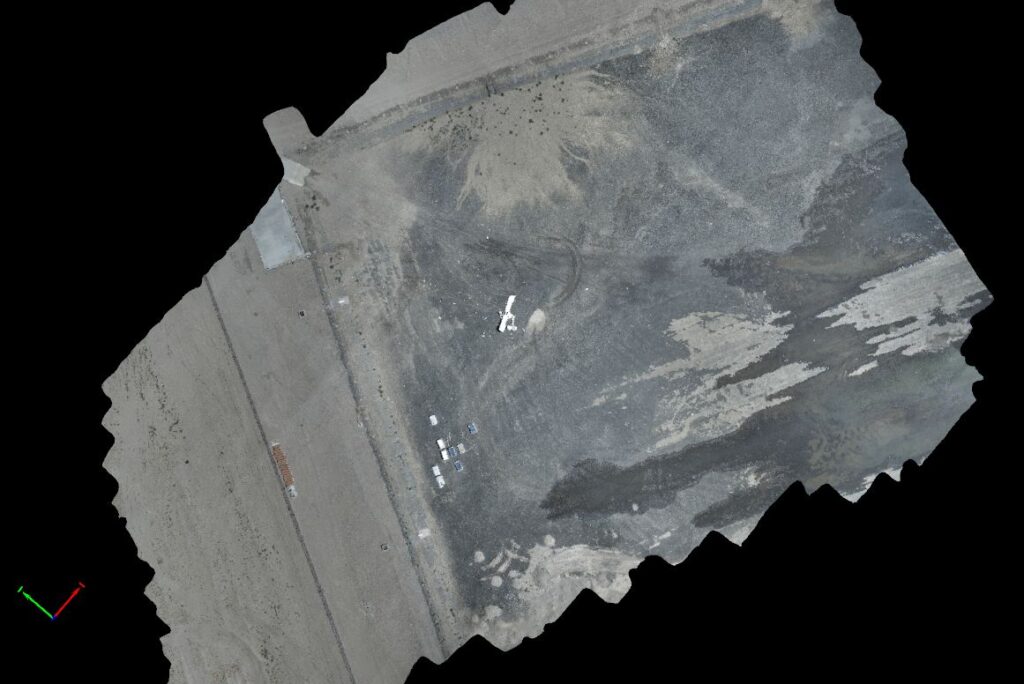
This is a capture of a scene brought to us for “repair,” as the pilot didn’t know what he didn’t know. Although we were able to pull a bit of a scene, the overexposure, too-high altitude/low GSD, and lack of obliques made this scene significantly less valuable than it might have been.
Not understanding the proper role or application of the UA in the capture process, the UA pilot created a scene that is difficult to accurately measure, lacking appropriate detail, and the overexposure creates difficulties laying in the mesh. While this scene is somewhat preserved as a twin, there is much detail missing where the equipment had the necessary specifications and components to capture a terrific twin. Pilot error cannot be fixed. Operating on the “FORD” principle, understanding that FOcus, exposuRe, and Distance (GSD) cannot be rectified/compensated for in post processing means it has to be captured properly the first time. The above scene can’t be properly brought to life due to gross pilot error.
“ALWAYS PUT THE AIRCRAFT OVER THE PRIMARY SCENE LOCATION TO CONFIRM EXPOSURE SETTINGS, KEEPING ISO AS LOW AS POSSIBLE. USE ISO 50-100 IN MOST OUTDOOR SCENARIOS TO OBTAIN THE BEST IMAGE. NEVER USE OVERSATURATED PHOTO SETTINGS OR LOG FORMATS FOR MAPPING.”
Ultimately, the primary responsibility is to go beyond a digital twin of the scene, but instead offer deep value to the investigator(s) which may enhance or accelerate their investigations. Regardless of whether it’s a crash scene, insurance capture, energy audit, or other mapping activity, understanding how to set up the mission, fly, process, and export the mission is paramount.
Capturing these sorts of scenes are not for the average run n’ gun 107 certificate holder. Although newer pilots may feel they are all things to all endeavors benefitting from UA, planning, strategy, and experience all play a role in ensuring qualified and quality captures occur. Pilots wanting to get into mapping should find themselves practicing with photogrammetry tools and flying the most challenging environments they can find in order to be best prepared for environmental, temporal, and spatial challenges that may accompany an accident scene. Discovery breeds experience when it’s cold and batteries expire faster, satellite challenges in an RTK or PPK environment, planning for overheated tablets/devices, managing long flight times on multi-battery missions, or when winds force a crabbing mission vs a head/tailwind mission. Learning to maintain GSD in wild terrain, or conducting operations amidst outside forces that influence the success or failure of a mission only comes through practice over time. Having a solid, tried and true risk mitigation/SMS program is crucial to success.
We were pleased to close out this highly successful mission, and be capable of delivering a 3.5 GB geotiff for overlay on Google Earth, while also being able to export the project for investigators to view at actual ground height, saving time, providing a safety net in rugged terrain, and a digital record/twin of the crash scene that may be used until the accident investigation is closed.
LUTS, Log, 10Bit: Geeking Out on Camera Formats for Drones
It takes more than just a Part 107 to be a good drone service provider: customers require expertise in production, too. If you’re confused about camera formats for drones and some of the newest options on the market, we’ve got you covered with this deep dive. UAS expert and industry figure Douglas Spotted Eagle here at KukerRanken provides a detailed and expert explanation of 10 bit file formats, LOG formats and Look-Up Tables (LUTS.).
Camera Formats for Drones: LUTS, LOG, 10Bit
The latest trend in UA camera systems is an ability to record in 10bit file formats, as well as in LOG formats, which allow the use of Look-Up Tables (LUTs, often pronounced “Loots” and more generally pronounced “luhts”), providing significantly greater dynamic range. This greater dynamic range enables color matching, greater opportunity to color correct with higher quality formats such as those offered by Sony, Blackmagic Design, Canon, and others. Video does not have to be recorded in LOG to use a LUT, but using an input LUT on a semi-saturated frames could generate undesirable results.
WHAT IS A LOOKUP TABLE?
A LookUp Table (LUT) is an array of data fields which make computational processes lighter, faster moving, and more efficient. They are used in a number of industries where intense data can be crunched more efficiently based on known factors. For purposes of video, a LUT enables the camera to record in a LOG format, enabling deep color correction, compositing, and matching. There are many LUTs available, some are camera-specific while others are “general” LUTs that may be applied per user preference. A LUT might more easily be called a “preset color adjustment” which we can apply to our video at the click of a button. Traditionally, LUTs have been used to map one color space to another. These color “presets” are applied after the video has been recorded, applied in a non-linear editing system such as Adobe Premiere, Blackmagic Resolve, Magix Vegas, etc.
Two types of LUTs are part of production workflows;
Input LUTs provide stylings for how the recorded video will look in a native format (once applied to specific clips). Input LUTs are generally applied only to clips/events captured by a specific camera. Input LUTs are applied prior to the correction/grading process.
Output/”Look LUTs” are used on an overall production to bring a consistent feel across all clips. “Look” LUTs should not be applied to clips or project until after all color correction/grading has been completed.
There are literally thousands of pre-built LUTs for virtually any scene or situation. Many are free, some (particularly those designed by well-known directors or color graders) are available for purchase.
In addition to Input/Look LUTs, there are also 1D and 3D LUTs. 1D LUTs simply apply a value, with no pixel interaction. 1D LUTs are a sort of fixed template of locked values. 3D LUTs map the XYZ data independently, so greater precision without affecting other tints are possible. For a deeper read on 3D vs 1D LUTs, here is a great article written by Jason Ritson.
HOW DOES A LUT WORK?
This is a fairly complex question that could occupy deep brain cycle time. In an attempt to simplify the discussion, let’s begin with the native image.
Natively, the camera applies color and exposure based on the sensor, light, and a variety of calculations. This is the standard output of the majority of off-the-shelf UA systems. This type of output is ideal for video that is not going to be heavily corrected, will be seen on the typical computer monitor or television display, and time is of the essence. These are referred to as “Linear Picture Profiles” and is the most common means of recording video. Cell phones, webcams, and most video cameras record in linear format. While this is most common, it also reduces flexibility in post due to dynamic range, bit-depth, and other factors. In linear profiles, the typical 8bit video has 256 values of color, represented equally across the color spectrum. The balance (equality) of pixel ranges does not allow the most effective use of dynamic range, limiting correction options in post. With linear picture profiles, bottom end/dark colors use equal energy as brighter exposures, so while color balance is “equal,” it is inefficient and does not allow the greatest range to be displayed for the human eye, specifically midtones and highlights.
To take the best advantage of a LUT, video should be recorded in a LOG format. It’s rare an editor would apply a LUT to linear video, as in most cases, color space, exposure, and dynamic range would be unrealistic and challenged.
LOG formats store data differently than linear picture profiles.
In the past, LOG formats were only accessible in very high-end camera systems such as the Sony CineAlta Series, and similar, high-dollar products. Today, many UA cameras offer access to LOG formats.
When the camera recording parameters are set to LOG (Logarithmic) mode, these native color assignments are stripped away, and the camera records data in a non-linear algorithm.
LOG applies a curve in the bottom end of the image (darks/blacks) and shifts the available space to the more visible areas of the color range where it is more efficient/effective.
Of course, this will create the illusion of a low-contrast, washed-out image during the recording process.
A-LOG image direct from camera
LUT applied, no additional grading
“A-LOG” is Autel Robotics logarithmic recording format. A-LOG not only allows for greater dynamic range, it is also a 10-bit format, enabling much greater chroma push when color correcting or grading. Most manufacturers offer their own LOG formats.
Graded image
Split screen comparing LUT, grade, and source image
Virtually every editing application today features the ability to import LUTs to be used with 8- 10-, or 12-bit LOG files. Autel and DJI are the two predominant UA manufacturers offering LOG capability to their users, and any medium lift UA that can mount a Sony, Canon, Blackmagic Design camera also would benefit from shooting in a LOG format.
Magix Vegas allows import of LUTs, and offers the ability to save a color correction profile as a LUT to be re-used, or shared with others.
SHOULD I BE SHOOTING IN LOG-FORMAT?
Shooting video in LOG is much like choosing between .DNG or .JPG. If images/video are to be quickly turned around, and time, efficiency, or client desires are more important than taking the time to grade or correct images, there is no benefit to shooting video in LOG formats. LOG, like DNG (or RAW) will simply slow the process. However, if images or video are to be matched to other camera systems, or when quality is more important than the time required to achieve the best possible image, then LOG should be used, to future-proof and preserve the best original integrity of archived footage. Of particular consideration are higher resolution formats, such as 2.7K, 4K, 6K, or 8K video. These formats will be most likely downsampled to HD for most delivery in the near future, and shooting in LOG allows for greatest re-use, or color preservation when down sampling. Without getting too deeply into the math of it, the 4:2:0 colorspace captured in a 4K or higher format will be 4:2:2 color sampled when delivered in HD, enabling significant opportunity in post-processing.
“Which is more committed to breakfast, the chicken or the pig? Baking colors into recorded video is limiting, and if appropriate, should be avoided.”
CAN I SEE THE FINAL OUTPUT BEFORE COMMITTING TO LOG?
Many monitors today allow for input LUT preview prior to, and during the recording process. This will require some sort of HDMI (or SDI) output from the UA camera into the monitor.
Input LUTs can be applied temporarily for monitoring only, or they can be burned into files for use in editing when capturing Blackmagic RAW (when using BMD products). Bear in mind, once a LUT has been “baked in” to the recorded video, it cannot be removed and is very difficult to compensate.
Most external monitors allow shooters/pilots to store LUTs on the monitor, which offers confidence when matching a UA camera to a terrestrial or other camera. In our case, matching a Sony A7III to the UA is relatively easy as we’re able to create camera settings on either camera while viewing through the LUT-enabled monitor, seeing the same LUT applied (virtually) to both cameras.
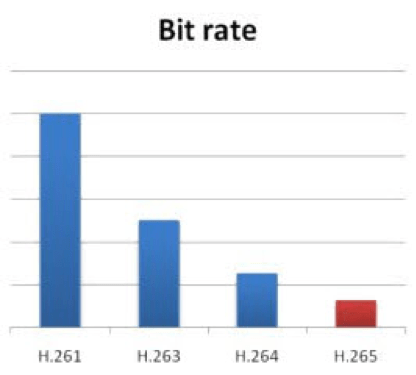
Most UA cameras today are capable of recording in h.264 (AVC) or h.265 (HEVC). Any resolution beyond HD should be always captured in h.265. H.264/AVC was never intended to be a recording format for resolutions higher than HD, although some folks are happy recording 2.7K or 4K in the lesser efficient format. It’s correct to say that HEVC/h.265 is more CPU-intensive, and there are still a few editing and playback software apps that either cannot efficiently decode HEVC. However, the difference in file size/payload is significant, and quality of image is far superior in the HEVC format. A video created using HEVC at a lower bit rate has the same image quality as an h.264 video at a higher bit rate.
More importantly, AVC/h.264 does not support 10-bit video, whereas HEVC does, so not only are we capturing a higher quality image in a smaller payload, we’re also able to access 10bit, which can make a significant difference when correcting lower quality imagery, particularly in those pesky low light scenarios often found close to sunset, or night-flight images that may contain noise. Additionally, 10-bit in LOG format allows photographers to use a lower ISO in many situations, reducing overall noise in the low-light image. Last but not least, AVC does not support HDR, whereas HEVC does. Each camera is a bit different, and each shooting scenario is different, so a bit of testing, evaluation, and experience enables pilots to make informed decisions based on client or creative direction or needs.
HEVC IS SLOW ON MY COMPUTER!
Slower, older computers will struggle with the highly compressed HEVC format, particularly when 10-bit formats are used. Recent computer builds can decode HEVC on the graphics card, and newer CPUs have built-in decoding. However, not everyone has faster, newer computer systems available. This doesn’t mean that older computers cannot be used for HEVC source video.
Most editing systems allow for “proxy editing” where a proxy of the original file is created in a lower resolution and lower compression format. Proxy editing is a great way to cull footage to desired clips/edits. However, proxies cannot be color corrected with accurate results. The proxies will need to be replaced with source once edits are selected. In our house, we add transitions and other elements prior to compositing or color correcting. LUTs are added in the color correction stage.
10-bit A-LOG, no LUT applied
10-bit A-LOG, LUT-only applied
10-bit A-LOG, LUT applied, Graded
10-bit A-LOG, LUT applied, Graded Split Screen
The “Transcend” video displayed above is a mix of high end, DLSR, and UA cameras, captured prior to sunrise. Using 10-bit A-Log in h.265 format allowed a noise-free capture. The video received a Billboard Music award. We are grateful to Taras Shevchenko & Gianni Howell for allowing us to share the pre-edit images of this production.
WRAP UP
Shooting LOG isn’t viable for every production, particularly low-paying jobs, jobs that require rapid turnaround, or in situations where the matched cameras offer equal or lesser quality image output. However, if artistic flexibility is desired, or matching high end, cinema-focused cameras, or when handing footage over to an editor who requires flexibility for their needs, then HEVC in 10-bit, LOG-mode is the right choice.
In any event, expanding production knowledge and ability benefits virtually any workflow and professional organization, and is a powerful step to improving final deliverables.
Pro Read: As a leak indicates that Autel Robotics may be the first to offer a 6/8K camera on a drone, UAS expert and industry leader Douglas Spotted Eagle dives in to what the advantages of 8k may be – and if the drone industry is ready to take advantage of them.
In 2004, Sony released the world’s first low-cost HD camera, known as the HVR-Z1U. The camera featured a standard 1/3” imager, squeezing 1440×1080 pixels (anamorphic/non-square) pixels on to the sensor. This was also the world’s first pro-sumer camera using the MPEG2 compression scheme, with a color sample of 4:2:0, and using a GOP method of frame progression, this new technology set the stage for much higher resolutions and eventually, greater frame rates.
It’s “father,” was the CineAlta HDWF900, which offered three 2/3” CCDs, which was the industry standard for filmmaking for several years, capturing big hits such as the “Star Wars Prequel Trilogy”, “Once Upon a Time in Mexico”, “Real Steel”, “Tomorrowland”, “Avatar”, “Spykids” (1 & 2), and so many others. The newer HDV format spawned from similar technology found in the HDWF900, and set the stage for extremely high end camera tech to trickle down into the pro-sumer space.
Overtime, camera engineers identified methods of co-siting more pixels on small imagers, binning pixels, or using other techniques to increase the capture resolution on small surfaces. Compression engineers have developed new compression schemes which brought forward AVC (h.263), MP4(h.264), and now HEVC/High Efficiency Video Codec(h.265), and still others soon to be revealed.
Which brings us to the present.
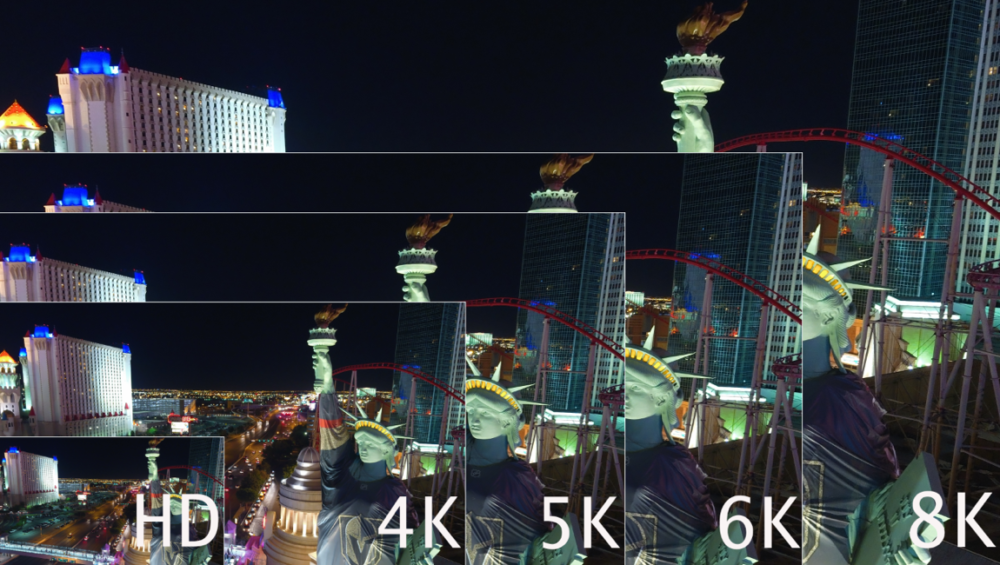
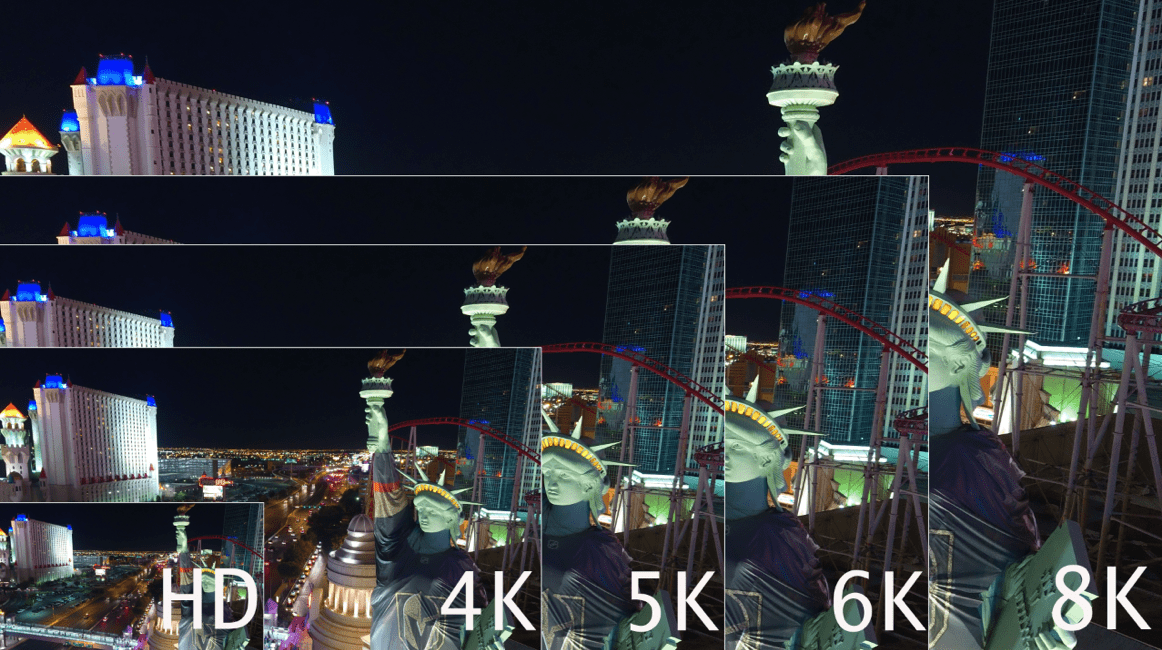
We have to roughly quadruplemegapixels to doubleresolution, so the jump from SD to HD makes sense, while the jump from HD to UHD/4K makes even more sense. Following that theme, jumping to 6K makes sense, while jumping to 8K is perfect theory, and nears the maximum of the human eye’s ability to resolve information.
At NAB 2018, Sony and Blackmagic Design both revealed 8K cameras and in that time frame others have followed suit.
During CommUAV and InterDrone, several folks asked for my opinion on 6 and 8K resolutions. Nearly all were shocked as I expressed enthusiasm for the format.
– “It’s impossible to edit.”
– “The files are huge.”
– “No computer can manage it.”
– “There is no where to show 8K footage.”
– “Human eyes can’t resolve that resolution unless sitting very far away from the screen.”
– “Data cards aren’t fast enough.”
And….so on.
These are all the same comments heard as we predicted the tempo of the camera industry transitioning from SD to HD, and from HD to 4K. In other words, we’ve been here before.
Video cameras are acquisition devices. For the same reasons major motion pictures are acquired at the highest possible resolutions, and for the same reasons photographers get very excited as resolutions on-camera increase, so should UAS photographers. Greater resolution doesn’t always mean higher grade images. Nor does larger sensor sizes increase quality of images. On the whole, higher resolution systems usually does translate into higher quality images.
Sensor sizes are somewhat important to this discussion, yet not entirely critical. The camera industry has been packing more and more pixels into the same physical space for nearly two decades, without the feared increase in noise. Additionally, better noise-sampling/reduction algorithms, particularly from OEM’s like Sony and Ambarella, have allowed far greater reduction in noise compared to the past. Cameras such as the Sony A7RIV and earlier offer nearly noise-free ISO of 32,000!
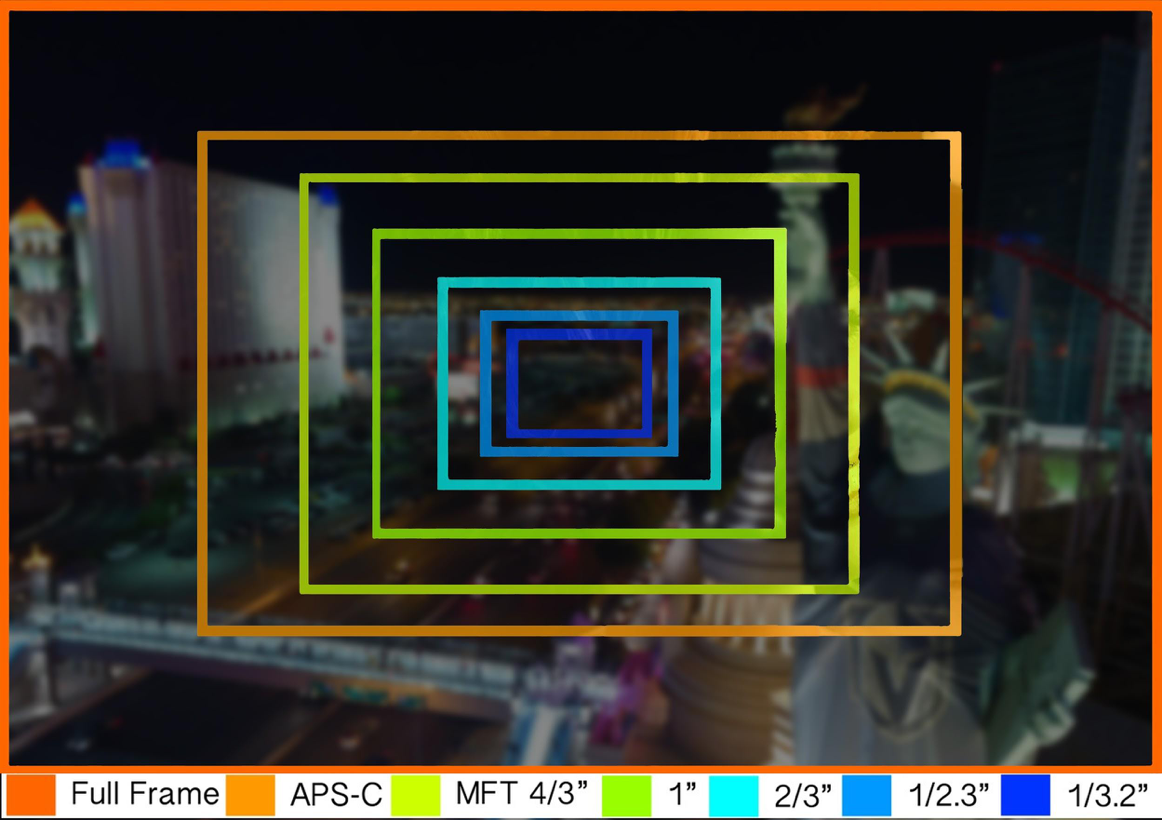
Sensor sizes vary of course, but we’ll find most UAS utilize the 1/2.3, or the 1” sensor. (Light Blue and Turquoise sizes respectively, as seen below).
“Imagine an UAS equipped with an 8K camera inspecting a communications tower. Resolution is high, so small specs of rust, pitting, spalling, or other damage which might be missed with lower resolutions or the human eye become apparent with a greater resolution.”
WHY DOES HIGHER RESOLUTION TRANSLATE TO BETTER FINISHED PRODUCT?
Generally, we’re downsampling video or photos to smaller delivery vehicles, for but one reason. In broadcast, 4:2:2 uncompressed color schemes were the grail. Yet, most UAS cameras capture a 4:2:0 color/chroma sample. However, a 4K capture, downsampled to 1080 at delivery, offers videographers the same “grail” color schema of 4:2:2!
As we move into 6 or 8K, similar results occur. 8K downconverted to HD offers a 4:4:4 color sample.
CROPPING
We gain the ability to crop for post editing/delivery to recompose images without fear of losing resolution. This means that although the aircraft may shoot a wide shot, the image may be recomposed to a tighter image in post, so long as the delivery is smaller than the source/acquisition capture. For example, shooting 4K for 1080 delivery means that up to 75% of the image may be cropped without resolution loss.
As the image above demonstrates, it’s quite possible to edit 8K HEVC streams on a newer laptop. Performance is not optimal without a great deal of RAM and a good video card, as HEVC requires a fair amount of horsepower to decode. The greater point, is that we can edit images with deep recomposition. Moreover, we have more pixels to work with, providing greater color correction, color timing, and depth/saturation.
For public safety, this is priceless. An 8K capture provides great ability to zoom/crop deeply into a scene and deliver much greater detail in HD or 4K delivery.
The same can be said for inspections, construction progress reports, etc. Users can capture at a high resolution and deliver in a lower resolution.
Another benefit of 6 and 8K resolutions is the increase in dynamic range. While small sensors only provide a small increase in dynamic range, a small increase is preferable to no increase.
To address other statements about 6K and 8K resolutions; They human eye has the ability to see around 40megapixels, age-dependent. 8K is approximately 33megapixels. However, the human eye doesn’t see equal resolutions across the surface. The center of our eye sees approximately 8megapixels, where the outer edges are not as deep. High resolution does provide greater smoothing across the spectrum, therefore our eyes see smoother moving pictures.
BEYOND THE HUMAN EYE
Going well-beyond the human eye, higher resolutions are applicable to “computer vision,” benefiting mapping, 3D modeling, and other similar applications. Generally speaking, more pixels equals greater smoothness and geometry. As technology moves deeper into Artificial Intelligence, higher resolutions with more efficient codecs become yet even more important. Imagine an UAS equipped with an 8K camera inspecting a communications tower. Resolution is high, so small specs of rust or other damage which might be missed with lower resolutions or the human eye become more visible with a greater resolution. Now imagine that greater resolution providing input to an AI-aided inspection report that might notify the operator or manager of any problem. Our technology is moving beyond the resolution of the human eye for good reason.
DATA STORAGE
Files from a 6 or 8K camera are relatively small, particularly when compared to uncompressed 8K content (9.62TB per hour). Compression formats, known as “Codecs” have been improving for years, steadily moving forward. For example, when compressions first debuted in physical form, we saw Hollywood movies delivered on DVD. Then we saw HD delivered on Blu-ray. Delivery over disc formats is dead, and now we’ve moved through MPG2, AVC, AVCHD, H.264, and now H.265/HEVC. In the near future we’ll see yet even more compression schemes benefitting our workflows whether delivered via streaming or thumbdrive. VVC or “Versatile Video Codec”will be the next big thing in codecs for 8K, scheduled to launch early 2022.
Unconventional h.264 and H.265/HEVCare currently being used as delivery codecs for compressed 6 and 8K streams. 8K has been successfully broadcast (in testing environments) at rates as low as 35Mbps for VOD, while NHK has set the standard at 100Mbps for conventional delivery. Using these codecs, downconverting streams to view OTA/Over The Air to tablets, smartphones, or ground station controllers is already possible. It’s unlikely we’ll see 8K streaming from the UAS to the GSC.
U3 Datacards are certainly prepared for 6 and 8K resolutions/datastreams; compression is what makes this possible. The KenDao 8K and Insta 8K 360 cameras both are recording to U3 cards, available in the market today.
It will be some time before the average consumer will be seeing 8K on screens in their homes. However, 8K delivered for advertising, matching large format footage being shot on Weapon, Monstro, Helium or other camera formats may be less time-consuming when using 8K, even from smaller camera formats carried on an UAS (these cameras may easily be carried on heavy-lift UAS).
Professional UAS pilots will benefit greatly from 5, 6, or 8K cameras, and should not be shy about testing the format. Yes, it’s yet another paradigm shift in an always-fluid era of aerial and visual technology. There can be no doubt that these higher resolutions provide higher quality in any final product. Be prepared; 2020 is the year of 5, 6, and 8K cameras on the flying tripods we’re using for our professional and personal endeavors, and I for one, am looking forward to it with great enthusiasm.
Experts Tested 4 Different Drone Mapping Solutions for Crime Scene Investigation. Here’s What Happened.
At Commercial UAV Expo in Las Vegas, more than 300 drone industry professionals watched as experts tested four different drone mapping solutions for crime scene investigation at night.
Commercial UAV Expo brought UAS professionals, developers, manufacturers, first responders, and related industries under one roof for the first time in nearly two years. Due to the pandemic, the show was less attended than previous years, yet provided robust live demonstrations, night flight, daytime seminars, panels, and case studies for the relatively large audience. There was a strong buzz amongst the crowd about being at an in-person event, and experiencing face to face communication for the first time in many months.
In addition to the “Beyond the Cage” Live Drone Demo Day that launched Commercial UAV 2021, produced by Sundance Media Group, Wednesday night provided attendees with a glimpse of the Crime Scene Investigator tools function in the dark hours. Sundance Media Group developed this methodology several years ago at the request of a law enforcement agency and has been presenting this methodology at academies, colleges, universities, and tradeshows since 2017, with a variety of aircraft including DJI Mavic, Phantom 4, Yuneec H520, Skydio, and Autel EVO series (versions 1 and 2). All successfully output data, excepting Skydio, which struggles with brightly lit events in surrounding darkness.
Presented by FoxFury, Sundance Media Group, Autel, and Pix4D, this event also invited SkyeBrowse to participate in the demonstration, showing the effectiveness and speed of their application.
Testing Drone Mapping Solutions for Crime Scene Investigation: Setting the Scene
With a model covered in moulage, mock slit throat, and blood trail on the ground, the demonstration began with the multi-vendor team led by Brady Reisch, Bryan Worthen of Kuker-Ranken, Todd Henderson and Patrick Harris of SMG, and David Martel. The team placed four FoxFury T56 lighting systems at specific, measured points in the scene, supplemented by FoxFury NOW lanterns and Rugo lighting to fill in holes and eliminate shadows.
Douglas Spotted Eagle of SMG and KukerRanken emcee’d the event through the two flights.
Douglas Spotted Eagle addresses the crowd of 300 persons
SkyeBrowse had the first flight, with its one-button capture. Brady Reisch set up the mission, with input from the SkyeBrowse developer instructing the exposure levels of the camera for the SkyeBrowse video mission. Once the mission was completed, the photos were uploaded to the SkyeBrowse website, where results were found approximately 30 minutes following the flight.
Brady Reisch of KukerRanken sets up the Skybrowse mission with Bobby Ouyang of Skybrowse
The Autel EVO II Pro was programmed on-site for an automated Skybrowse mission and the demonstration began. The area is highly congested with palm trees and buildings enclosing the small rotunda in front of the Mirage Hotel Convention Center.
Brady Reisch flew the second EVO II mission manually, in much the same configuration as though the aircraft had flown a double-grid mission, supplemented by high-altitude orbit, coupled with manually captured orbit and select placements. Because of the crowd, time was a consideration. In an actual homicide scene, more low-placed images would have been captured.
Brady Reisch monitors time as Pix4DReact rapid-renders the scene (60 seconds)
The mission photos were uploaded to Pix4dReact on-scene and rendered while the audience observed, requiring approximately 60 seconds to output an ortho-rectified, 2D image, complete with evidence markers/tags, and PDF supplemental report output. Also loaded were the photo images into Pix4D and Leica Infinity software packages, to be rendered for 3D viewing once the show floor opened on Thursday. Pix4DReact is a two-dimensional, rapid-mapping solution, so there is no 3D view.
The four screen captures tell the rest of the story, and readers can determine for themselves what each software is capable of providing. One point of interest is that there were many claims of “guaranteed 1cm of precision regardless of flight area,” which has yet to be verified. The Kuker-Ranken team will be re-flying a mission with two separate GPS systems (Leica and Emlid) to verify the claims of precision.
Precision is Repeatable
Precision is repeatable. Accuracy is the degree of closeness to true value. Precision is the degree to which an instrument or process will repeat the same value. In other words, accuracy is the degree of veracity while precision is the degree of reproducibility. With a base station, NTRIP, Spydernet, PPK, or RTK workflow, precision is always the goal, well-beyond accuracy. This is a relatively new discussion in the use of unmanned aircraft, and although the topic seems simple enough, complexity holds challenges not easily dismissed by inexperience or lacking education and practice. We are fortunate to have a partner in Kuker-Ranken, providing precision tools to the survey, forensic, civil engineering, and AEC industries since 1928. The KR team includes PLS’, EIT, and other accredited precision professionals, rarely found in the UAS industry.
Precision is critical for surveyors, civil engineers, forensic analysts and investigators, construction sites, mapping, agriculture, and other verticals in the UAS industry, and this sort of scene is no exception. Being able to properly place a map or model into a coordinate is necessary for many professional pilots in the UAV field, and while this mission is not precise to coordinate, it is precise within itself, or in other words, measurements will be accurate in the image, while being imprecise to the overall location.
We’ll dive more deeply into precision in a future article. For purposes of this exercise, we’re more interested in accuracy of content in the scene, and all four outputs were similar in accuracy within the scene itself. In other words, distances, volumes, and angles may be measured point to point. Pix4DReact is not as accurate as the other three tools, as it’s not intended to be a deeply accurate application given speed of output.
Output Results of Drone Mapping Solutions
Output #1: SkyeBrowse (processing time, approximately 35 minutes)
Output #2: Pix4Dreact (processing time, approximately 1 minute)
Output #3: Pix4Dmapper (processing time, approximately 2.5 hours)
Output #4: Leica Infinity (processing time, approximately 2 hours, 50 minutes)
Selecting the Right Drone for Your Construction Business
Douglas Spotted Eagle and Brady Reisch headed into the field to collect aerial construction data over fourteen weeks with three different drones. Their goal was to determine which drone was best for the construction job site.
They used three popular aircraft for the comparisons and the results were pretty surprising.
Unmanned Aircraft (UA/Drones) have rapidly become a significant component of the modern construction industry workflow whether it’s for progress reporting, site planning, BIM, inventory control, safety awareness, structure inspection, topo’s, or other purposes. Site supervisors, architects, and stakeholders all benefit from the rapid output of accurate 2D/Ortho, or 3D models that may be used for purposes ranging from simple visualizations, progress reporting, stockpile calculations, DSM, contours, to more complex overlaying blue-prints in the As-Designed/As-Built or BIM process.
Choosing the right aerial asset/UA may be challenging, particularly as the marketing of many UA is focused on RTK built in (rarely accurate) PPK solutions and a many component workflow versus others that are single-step workflows. Decisions on aircraft choices will be made based on budget, accuracy requirements, speed to result, and overall reporting requirements.
On any site flown for BIM, input to AutoDesk or similar tools, having accurate ground control points (GCP) is required. GCP’s may be obtained from the site surveyor, county plat, or other official sources, and this is often the best method assuming that the ground control points may be identified via UA flight-captured images. Site supervisors may also capture their own points using common survey tools. Devices such as the DTResearch 301 RTK tablet may be used to augment accuracy, combining GPC location points from the air and on the ground. Failing these methods, site supervisors can capture their own points based on the specific needs of the site. These points may be calculated via traditional rover/base RTK systems, or using PPK, RTK, or PPP solutions, again being budget and time dependent. If centimeter (vs decimeter) accuracy is required, RTK or PPK are necessary.
Putting accuracy aside, image quality is gaining importance as stakeholders have become accustomed to photo-grade ortho or models. Oftentimes, these models are used to share growth with inspectors as well, which means having presentation-grade images may be critical. Image quality is high priority when generating pre-development topos, or simply illustrating a tract of land from all directions. In other words, a high-quality imaging sensor (camera) is a necessity. Some aircraft allow user-choice cameras, while many UA manufacturers are creating cameras specific to their aircraft design.
Turning to aircraft, we chose three popular aircraft for the comparisons:
Flying the site several times in various conditions, the same RTK capture points are used in all three mapping projects. The DTResearch 301 RTK system is used to capture GCP on-location, with Hoodman GCP kit as the on-ground GCP. The Hoodman SkyRuler system was also captured as a scale-constraint checkpoint.
This commercial site is small in size (1.64 acres), and one we were able to begin capturing prior to forms being laid, all the way to vertical installation.
Accuracy varied greatly with each aircraft system, particularly in elevation calculations. Deviations are from projected points vs the GCP points obtained through a surveyor’s RTK system. Overall (and to our surprise), the Autel EVO was most accurate with a deviation of:
x-5.112ft
y-47.827ft
z-16.541ft
The Yuneec H520/E90 combo was not far behind with a deviation of:
X-10.323ft
y-44.225ft
z-92.788ft
Finally, the DJI Phantom 4 presented deviations of:
x-1.95ft
y-45.565ft
z-140.626ft
All of these deviations are calculated and compensated for in Pix4DMapper, which is used to assemble all of these week-to-week projects. As 3D modelling was part of the comparison/goal, obliques were flown in addition to nadir captures. While manual settings are often essential for high quality maps and models, in the following images cameras were all set to automatic exposure, shutter, ISO.
It is important to remember that these are NOT corrected via network nor base station. This is autonomous flight, localized in Pix4D.
MODELS
AUTEL EVO (Original version)
YUNEEC H520/E90
PHANTOM 4 PRO
All aircraft models work well with Pix4DMapper, although at the time of this writing, Pix4D has not created lens profiles for the Autel EVO (they have indicated this feature should be available “soon”). We custom-sized the lens profile ourselves, based on information provided by Autel’s product managers. *as of 2.1.22, Pix4D has generated lens profiles for both Autel EVO and EVO II aircraft.
Orthos
AUTEL EVO
YUNEEC H520/E90
PHANTOM 4 PRO
Although image quality is subjective, our client and our team all agree the Autel EVO provides the best image quality and color of all aircraft, with all aircraft set to automatic exposure, shutters peed, and ISO of 100. This is a surprise, given the Autel is a ½.3 imager, vs the 1” rolling shutter of Yuneec and global shutter of the DJI aircraft. Based on internet forums, Autel is very well known for their camera parameters being impressive.
All flights are single-battery flights. This is important, as changing batteries offers different functions for the various aircraft. Using Yuneec and DJI products and their respective software applications, we are able to fly larger sites with proper battery management with the aircraft returning to launch point when a battery is depleted and resume a mission where it left off once a fresh/charged battery is inserted. The Autel mission planner currently does not support multi-battery missions (although we’re told it will soon do so).
There are a few aspects to this workflow that are appreciated and some that are not. For example, when flying Autel and Yuneec products, we’re able to act as responsible pilots operating under our area wide Class B authorization provided by the FAA. To fly the DJI Phantom, the aircraft requires a DJI-provided unlock that permits flights. It’s a small annoyance, yet if one shows up on a jobsite not anticipating an unlock, it can be tedious. In some instances, we are just on the edge and outside controlled airspace, yet DJI’s extremely conservative system still requires an unlock. Most times, the unlock is very fast; other times, it doesn’t happen at all.
All three aircraft are reasonably fast to deploy, and this is important when a LAANC request for a zero-altitude grid is a short window. Autel clearly wins the prize for rapid deployment, with the EVO taking approximately 30 seconds to launch from case-open to in-the-air. Mission planning may be managed prior to flight and uploaded once the UA has left the ground. We are experiencing much the same with the latest release of the EVO II 1” camera as well. We also appreciated the lack of drift and angle in relatively high winds (26mph+).
DJI is next fastest at approximately three minutes, (assuming propellers remain attached in the case), while the mission planning aspect is a bit slower than the Autel system. DJI uploads the mission to the aircraft prior to launch. Of course, this is assuming we’ve already achieved an approval from DJI to fly in the restricted airspace, on top of the FAA blanket approval. If we don’t, we may find (and have found) ourselves unable to fly once on-site, due to glitches or slow response from DJI.
Yuneec is the slowest to deploy, given six props that must be detached for transport. Powering the ST16 Controller, attaching props, and waiting for GPS lock often requires up to five minutes. The mission planning tool (DataPilot) is significantly more robust than DJI’s GSPro, third party Litchi or other planning apps, and is far more robust than Autel Explorer’s mission planner. DataPilot also essentially ensures the mission will fly correctly, as it auto-sets the camera angle for different types of flight, reducing the margin for pilot error. The Yuneec H520 is superior in high winds, holding accurate position in reasonably high winds nearing 30mph.
All three aircraft turn out very usable models. All aircraft capture very usable, high-quality images. All of the aircraft are, within reason, accurate to ground points prior to being tied to GCP.
We were surprised to find we prefer the Autel EVO and are now completing this project after having acquired an Autel EVO II Pro with a 1” camera and 6K video.
Why?
Foremost, the Autel EVO family offered the most accurate positioning compared to the other aircraft in the many, many missions flown over this site. With dozens of comparison datasets, the Autel also offered the fastest deployment, and ability to fly well in high winds when necessary. The cost of the Autel EVO and EVO II Pro make this an exceptionally accessible tool and entirely reliable. That the Autel EVO requires no authorization from an overseas company, particularly in areas where we already have authorizations from the FAA, is significant to us, and the image quality is superior to either of the other aircraft.
We also greatly appreciate the small size of the aircraft, as it takes little space in our work truck, and our clients appreciate that we’re not invasive when working residential areas for them. The aircraft isn’t nearly as noisy as other aircraft, resulting in fewer people paying attention to the UA on the jobsite. The bright orange color, coupled with our FoxFury D3060 light kit (used even in daylight) assists in being able to see the aircraft quite easily, even when up against a white sky or dark building background.
We also of course, appreciate the speed in deployment. With safety checks, LAANC authorizations, planning a mission, and powering on remote and aircraft, the Autel EVO is deployable in under two minutes. When flying in G airspace, from case to airborne can be accomplished in under 30 seconds.
Battery life on the EVO 1 is substantial at 25 minutes, while our newly acquired EVO II Pro offers 40 minutes of flight time with incredible images to feed into Pix4D or other post-flight analytics software.
Of greatest importance, the EVO provides the most accurate XYZ location in-flight compared to the other aircraft. For those not using GPS systems such as the DTResearch 301 that we’re using on this project, accuracy is critical, and being able to ensure clean capture with accurate metadata is the key to successful mapping for input to Autocad applications.
All these FARs, what’s a drone pilot to do in order to understand them? Do they matter?
YES!
In virtually every aviation pursuit except for sUAS, an understanding of regulations is requisite and part of most testing mechanisms. As a result, many sUAS pilots holding
a Remote Pilot Certificate under Part §107 are woefully uninformed, to the detriment of the industry.
Therefore, sUAS pilots would be well-served to inform themselves of how each section of relevant FARs regulate components of aviation.
Let’s start by digging into the intent of each Part.
§Part 91 regulates General Operating and Flight Rules.
§Part 101 regulates Moored Balloons, Kites, Amateur Rockets, Unmanned Free Balloons, and some types of Model Aircraft.
§Public Law Section 336 regulates hobby drones as an addendum to Part 101.
§Part 103 regulates Ultra-Light Vehicles, or manned, unpowered aviation.
§Part 105 regulates Skydiving.
§Part 107 regulates sUAS
§Part 137 regulates agricultural aircraft
RELEVANT PARTS (Chapters):
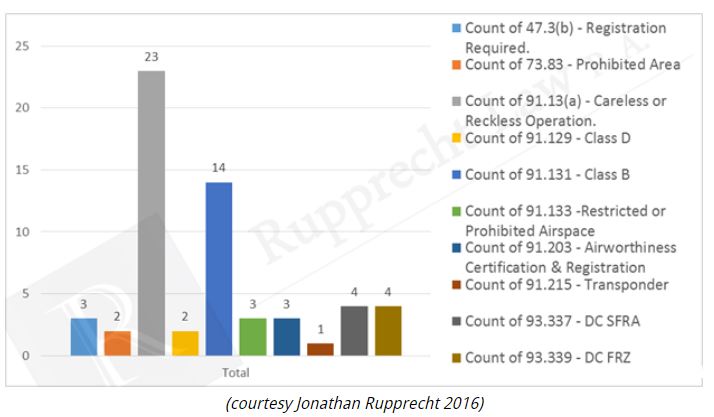
Part §91
This portion of the FARs is barely recognized, although certain sections of Part 91 may come into play in the event of an action by the FAA against an sUAS pilot. For example, the most concerning portion of Part 91 is 91.13, or “Careless or Reckless Operation.” Nearly every action taken against sUAS pilots have included a charge of 91.13 in the past (prior to 107).
Specific to drone actions, The vast majority of individuals charged have also included the specific of a 91.13 charge.
sUAS pilots whether recreational or commercial pilots may be charged with a §91.13 or the more relevant §107.23 (reckless)
It’s pretty simple; if there are consequences to a pilot’s choices and actions, it’s likely those consequences also included a disregard for safety or planning, ergo; careless/reckless. The FAA has recently initiated actions against Masih Mozayan for flying his aircraft near a helicopter and taking no avoidance action. They’ve also taken action against Vyacheslav Tantashov for his actions that resulted in damage to a military helicopter (without seeing the actual action, it’s a reasonable assumption that the action will be a §91.13 or a §107.23 (hazardous operation).
Other parts of Part 91 are relevant as well. For example;
§91.1 Applicability.
(a) Except as provided in paragraphs (b), (c), (e), and (f) of this section and §§91.701 and 91.703, this part prescribes rules governing the operation of aircraft within the United States, including the waters within 3 nautical miles of the U.S. coast.
The above paragraph includes sUAS. Additionally, Part 107 does not exclude Part 91. Airmen (including sUAS pilots) should be aware of the freedoms and restrictions granted in Part 91.
§91.3 Responsibility and authority of the pilot in command.
(a) The pilot in command of an aircraft is directly responsible for, and is the final authority as to, the operation of that aircraft.
(b) In an in-flight emergency requiring immediate action, the pilot in command may deviate from any rule of this part to the extent required to meet that emergency.
(c) Each pilot in command who deviates from a rule under paragraph (b) of this section shall, upon the request of the Administrator, send a written report of that deviation to the Administrator.
§91.7 Civil aircraft airworthiness.
(a) No person may operate a civil aircraft unless it is in an airworthy condition.
(b) The pilot in command of a civil aircraft is responsible for determining whether that aircraft is in condition for safe flight. The pilot in command shall discontinue the flight when unairworthy mechanical, electrical, or structural conditions occur.
§91.15 Dropping objects.
No pilot in command of a civil aircraft may allow any object to be dropped from that aircraft in flight that creates a hazard to persons or property. However, this section does not prohibit the dropping of any object if reasonable precautions are taken to avoid injury or damage to persons or property.
§91.17 Alcohol or drugs.
(a) No person may act or attempt to act as a crewmember of a civil aircraft—
(1) Within 8 hours after the consumption of any alcoholic beverage;
(2) While under the influence of alcohol;
(3) While using any drug that affects the person’s faculties in any way contrary to safety; or
Sound familiar?
SubPart B also carries relevant information/regulation with regard to operation in controlled airspace, operations in areas under TFR ((§91.133), operations in disaster/hazard areas, flights during national events, lighting (§91.209)
PART 101
Part §101 has a few applicable sections.
Subpart (a) under §101.1 restricts model aircraft and tethered aircraft (balloons). Although subpart (a.4. iiv) is applicable to balloon tethers, there is argument that it also applies to sUAS. Subpart (a.5.iii) defines recreational flight for sUAS/model aircraft.
Finally, §101.7 re-emphasizes §91.15 with regard to dropping objects (may not be performed without taking precautions to prevent injury or damage to persons or property). Public Law 112-95 Section 336 (which may be folded into a “107 lite” version), clarifies sections not added to Part 101.
Bear in mind that unless the pilot follows the rules and guidelines of a NCBO such as the AMA, AND the requirements of that NCBO are met, the flight requirements default to Part 107 requirements.
PART §103
Part §103 regulates Ultralight vehicles (Non powered, manned aviation)
Although no component of Part §103 specifically regulates UAV, it’s a good read as Part 103 contains components of regulation found in Part 107.
PART §105
Part §105 regulates Skydiving.
Part §105 carries no specific regulation to sUAS, an understanding of Part 105 provides great insight to components of Part 107. Part 107 has very few “new” components; most of its components are clipped out of other FAR sections.
PART §107
Although many sUAS pilots “have their 107,” very few have actually absorbed the FAR beyond a rapid read-through. Without a thorough understanding of the FAR, it’s difficult to comprehend the foundation of many rules.
PART §137
Part 137 applies specifically to spraying crops via aerial vehicles.
Those looking into crop spraying via sUAS should be familiar with Part 137, particularly with the limitations on who can fly, where they can fly, and how crops may be sprayed. One area every ag drone pilot should look at is §137.35 §137.55 regarding limitations and business licenses.
The bottom line is that the more informed a pilot is, the better pilot they can be. While there are many online experts purporting deep knowledge of aviation regulations and how they specifically apply to sUAS, very few are familiar with the regulations in specific, and even less informed as to how those regulations are interpreted and enforced by ASI’s. We’ve even had Part 61 pilots insist that the FSDO is a “who” and not a “what/where.” Even fewer are aware of an ASI and how they relate to the world of sUAS.
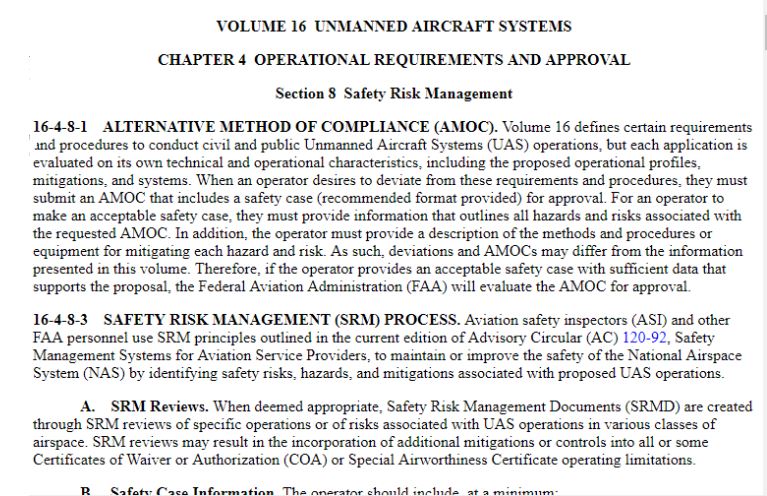
FSIM Volume 16
It is reasonably safe to say that most sUAS pilots are entirely unaware of the Flight Standards Information Management System, aka “FSIMS.” I’ve yet to run across a 107 pilot familiar with the FSIMS, and recently was vehemently informed that “there is nothing beyond FAR Part 107 relative to sUAS. Au contraire…
Familiarity with the FSIMS may enlighten sUAS operator/pilots in how the FAA examines, investigates, and enforces relevant FARs.
Chapter 1 Sections 1, 2 and 4 are a brief, but important read, as is Chapter 2, Section 2.
Chapter 3 Section 1 is informational for those looking to apply for their RPC Part 107 Certificate.
Chapter 4 Sections 2, 5, 7, 8 are of particular value for commercial pilots operating under Part 107.
Volume 17, although related only to manned aviation, also has components related to 107, and should be read through (Chapters 3 & 4) by 107 pilots who want to be informed.
Gaining new information is always beneficial, and even better if the new information is implemented in your workflow and program. Become informed, be the best pilot you can be, and encourage others to recognize the value in being a true professional, informed and aware.
Drones and unmanned aircraft in AEC scanning and construction
Six ways drones have proven themselves as a tool for the AEC, Surveying, and mapping industries
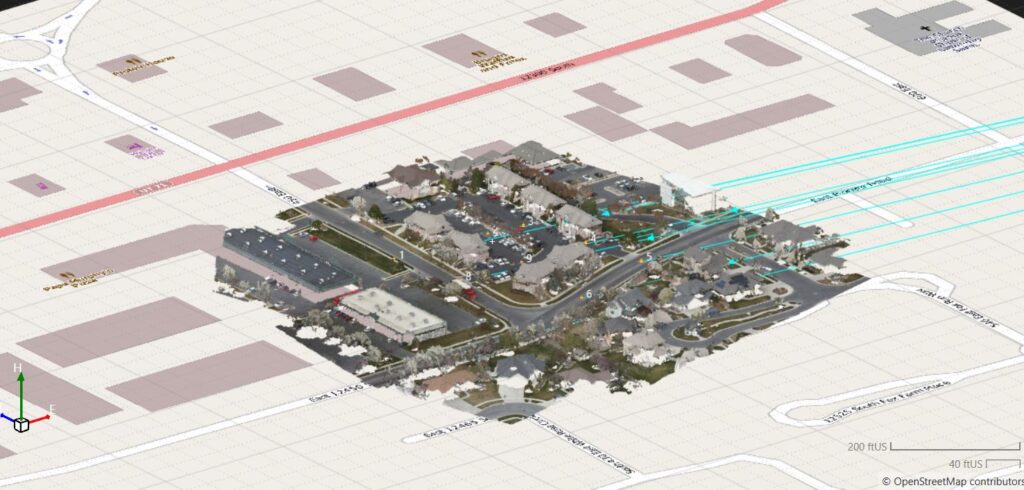
Drones and unmanned aircraft in AEC scanning and construction process are becoming more common. Unmanned aircraft, or drones are becoming much more common on today’s project sites. many companies in the AEC, Surveying and mapping industries are utilizing these aircraft daily. So how do drones capture data? What are professionals getting out of said data? What makes a drone into a valuable tool versus a toy?
UAS technology has advanced to a point where the aircraft; while still very sophisticated, are quite simple to operate. They utilize; altimeter’s, magnetometers, inertial measurement units, GNSS (GPS) and radio transmitters to control the flight operations, but the end-user would never know it. These sensors and more are all managed behind the scenes so well that an operator can takeoff from any point, fly a “mission” which involves several tasks collecting data, avoid collisions from unexpected obstacles, know when they have just enough battery to return home safely and land all in a constantly changing environment, 100% autonomously starting from a single tap for initiation. Flying a drone is fun but unless you’re collecting data it brings no value. There are many sensors that can be attached to unmanned aircraft such as LiDAR and Gravitometers but in this article we are primarily going to address cameras and their use in Photogrammetry.
Photogrammetry
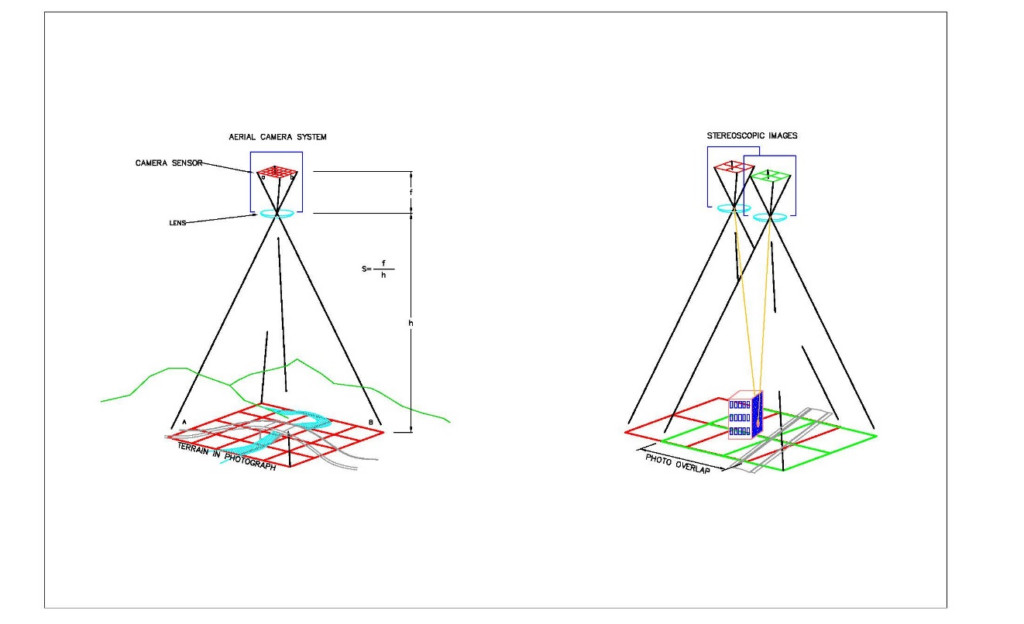
When you photograph an object from two different angles and add some Trigonometry, three dimensional measurements can be calculated. The entire process is simple and automated. A 3D model from aerial imagery is nothing new. Photogrammetry can be summarized as; the art, science and technology of making precise measurements from photos, and has been around since the mid 1800’s.
The whole process works like this: The distance (f) from a Camera Lens to its sensor is proportional to the distance (h) from said camera lens to objects being photographed. This property is written into several equations that photogrammetrists use to calculate things such as the scale of a photo and even the elevation of specific points or pixels in aerial photographs.
When two overlapping photographs are in correct orientation relative to each other, a Stereopair or Stereoscopic Imagery exists. This imagery creates perspective on objects within the overlap of the photographs and is the principle behind all forms of 3D viewing.
As mentioned above, drone users can pre-program routes to fly over their intended mapping area. Photos are taken with specific overlap which is computed based on altitude, speed, and the resolution of their camera sensor. Drones use the onboard sensors like GNSS or even real time corrected positioning (RTK) to both georeference the photos taken, control the flight of the by changing the RPM’s of the individual motors. This data is all carried over in the image files where they are further processed.
Today’s Photogrammetry softwares use these mathematical principles to orient, scale and combine photographs and data. The software will ultimately generate Point Clouds, Orthorectified (measurable) photos and 3D models with varying output types.
Drones and unmanned aircraft in AEC and Construction: Valuable Applications for AEC, Surveying, and mapping.
Surveying and Mapping. The use of drones and unmanned vehicles in surveying and mapping is almost self-evident. Surveyors and Cartographers have used Aerial Photography dating back about as far as the invention of the airplane. What may not be immediately apparent are the costs to purchase a survey-quality UAS and required software is a small investment in comparison to traditions surveying equipment and the man hours saved easily pays for itself. Point Clouds and Orthometric photos are great for drafting planimetric features and generating TIN surfaces to represent topography. Whether you’re mapping for design data, a feasibility study, GIS, or performing an ALTA/ACSM survey, using unmanned vehicle to capture data may be significantly more efficient than traditional means.
Reality Capture, which is just that; capturing the reality of the current conditions of a project site. This is a great practice for design, bidding, marketing and simply helping clients “capture the vision.” This may be as simple as viewing an oblique photograph or as complicated as combining a designed structure with a 3D mesh and viewing it in VR. I personally get a kick whenever I see a IFC model inserted in a point cloud.
Building Information modeling (BIM). It would be hard to mention reality capture without mentioning BIM. While flying a drone indoors is doable its not very practical so this is not what we are referring to here. Many companies today, especially in the design-build world are utilizing BIM for much more than building modeling. They are integrating models in all their civil design as well. These departments are already using laser scanning and are familiar with point clouds so adding a UAS into their tool chest is a natural move. Drones are great for capturing data that can be used for clash detection, QC, and as-built drawings.
Pre-Construction and Takeoffs are a major part of heavy civil construction. When it comes to moving dirt, knowing exactly what must be done can make all the difference in winning a bid, making a profit or losing your shorts. This is done when companies are bidding on projects, but the same process occurs over often in design builds and any time a RFI or change order comes up. Capturing data to that represent the existing site condition is key when building a model and matching existing roadway and other civil tie-in points. Using a drone is a great way to make this happen.
Project Management. Unmanned Aircraft may be utilized for many processes in project management. Creating progress reports and viewing current conditions may be the most basic use and might just be the most beneficial when it comes to decision making. Billing on some projects is solely based on materials moved and/or installed. This makes tracking linear feet, area, and volumes the bottom line. Some other overlooked uses may include, creating safety plans and incident reports, public involvement, and training. There are also various other project management uses above.
Inspections. Drones are one of the best tools utilized in inspections. Often an environment is not safe for a person such as inspecting a high wall in an open pit mine; or the situation may not be as efficient for an individual such as climbing versus flying to inspect bolts on a suspension bridge. When we apply the use of Infrared /thermals sensors to unmanned aircraft they are capably much more. Infrared light is absorbed by water making it possible to discover moisture that may be invisible to the naked eye. This is great for leak detection among other things. Thermal makes it possible to view and analyze heat signatures. This is often used to find areas of heat loss in anything from mechanical to thermal applications.
One of the biggest challenges today’s companies in the AEC, Surveying and Mapping industry face is a shortage of manpower. The only way to overcome a shortage in manpower is to innovate. Many choosing to innovate are looking to drone to solve their problems. Two trends I’ve noticed in helping companies develop their UAS applications is that they may start with a particular expectation in mind and one drone, but they always utilize their UAS data more than they anticipated and want to expand their drone fleet. I believe UAS technology is one of the best investments for a company in these industries to make. It is very apparent to me that Unmanned Aircraft are a major focus in developing technology. They are a powerful tool and not a toy.
Kuker-Ranken has been in business for nearly 100 years; Customer Service is our top priority, whether precision instruments, unmanned aircraft/drones, or construction support supplies. Call us today for pricing on drones, training, and service! (800) 454-1310